4676_1.jpg kép nagyításához")
 4676_2.jpg kép nagyításához")
 4676_3.jpg kép nagyításához")
http://komlomedia.hu/13-iq100/4676-melysegerzekeles-segiti-a-robotkezeket#sigProIdd3510e920f
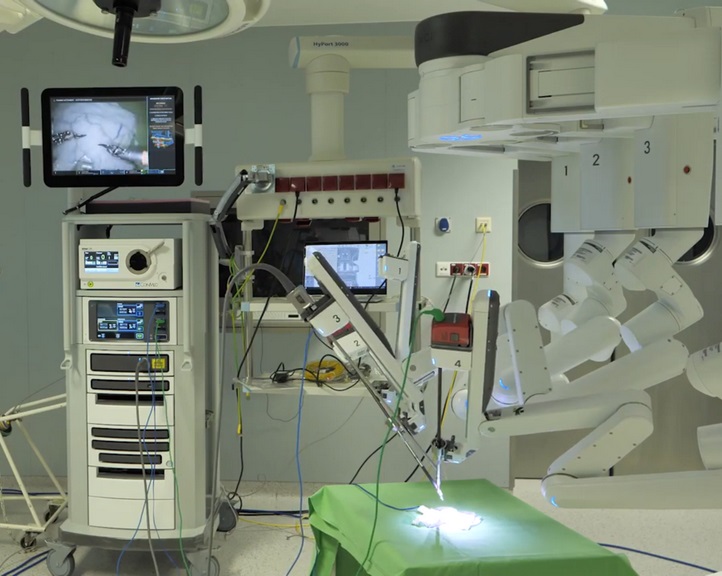
A veszélyzónákba, mint például a fukusimai atomerőműbe küldött robotoknak erős, biztos fogásra van szükségük. Ehhez nyújthat segítséget egy robotkéz, ami három dimenzióban "lát".
A londoni Shadow Robot cég egy Kinect mélységérzékelő kamerával ellátott megoldást tesztel, amit Dexterous Hand (ügyes kéz) névre kereszteltek. A Kinect technikával egy mobil robot bármilyen tárgy háromdimenziós alakját képes elemezni, amit a kezébe fog, vagy elé tartanak. Az elemzést követően egy szoftver háromdimenziós számítógépes modellt alkot a tárgyról, kidolgozva az ujjak legbiztosabb fogást eredményező elrendezését.
A Shadow Robot és a londoni King's College által a brit Műszaki Stratégiai Testület finanszírozásával kifejlesztett technológiát a müncheni Automatica 2014 szakkiállításon mutatták be.
Amint egy tárgyat közelítenek a kézhez - legyen az egy törékeny villanykörte, egy erős fémflaska, vagy egy újság - a szoftver nem csupán letapogatja az alakját, de az elhelyezkedését is megbecsüli. "Amint meglát egy tárgyat és kiszámítja az saját magához viszonyított helyzetét, kidolgozza a megmarkolásának legjobb módját" - taglalta Gavin Cassidy, a Shadow Robot gyártási vezetője. "Miközben tartja a tárgyat, nyomási és érintési érzékelőivel folyamatosan ellenőrzi a fogás biztosságát"
Ez azt jelenti, hogy ha egy kis gyümölcsdarabot kínálunk a robotkéznek a rendszer csupán két ujjat és a hüvelykujjat használja, hogy könnyed, finom fogást biztosítson. Egy nagyobb tárgy esetében az összes ujját használja, körülölelve a tárgyat. A rendszer mindezek mellett képes az azonosított tárgyak adatainak eltárolására, hogy a következő alkalommal gyorsabb legyen a felismerési folyamat, tette hozzá Mark Addison, a Shadow Robot szoftverfejlesztője.
Tesztcélokkal a rendszer egy külső mélységérzékelő kamerát használ, ami a kéz közelében helyezkedik el, a végcél azonban egy mikrochip méretű nagy felbontású kamera, ami magában a kézben kap majd helyet.
Forrás: sg.hu Kattintson ide...